Keeping it real
“Crashing a digital shadow has zero impact,” Gibson said. “If we crash them, we just see an unwanted overlap with the machines. That’s when we go, ‘Oh, how did that happen?’, figure it out, and advise the machine owners of what changes must be made to prevent a collision.”
Keeping the test as real as possible is the challenge.
“It’s very important that we don’t introduce any shortcuts to generating the machine position data. In the AuditSense world, we have physical representation.”
The ACS controller software enters a virtual reality environment. It just doesn’t know it. No code is hacked, no fake signal is injected directly into the data stream.
“We’re only simulating the interactions that cause its encoders to generate a signal. We actually have exactly the same units that are on the machines on site in the digital shadow.”
The sensors are physically manipulated by variable-speed motors.
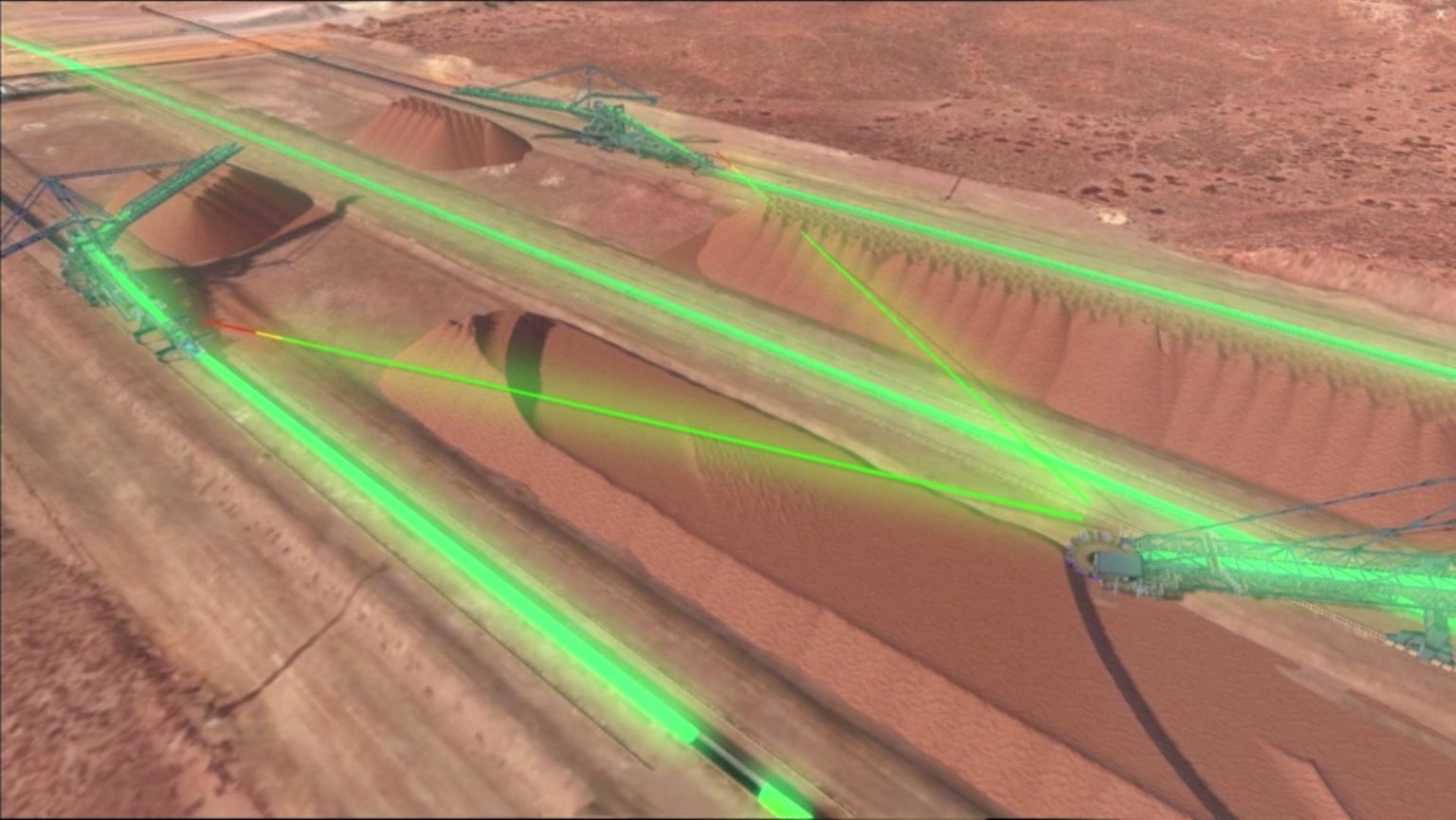
“One might be for travelling up and down the rail. Another for measuring slew – the pivoting of a boom in a horizontal plane. And others will be for luff – pivoting up and down in a vertical plane.
“The encoders will interpret that input and send digital numbers through a whole lot of paths to inform the off-board anti-collision system of each machine’s precise position. So if we bypass all that, we’re not actually testing it.”
The encoders encode. The ACS logic and processor computes. It then sends instructions back to a virtual bulk handler to allow or disallow movement.
“In the real world implementation, if all those inputs don’t line up, then it will fail. It may judge that one encoder is an outlier – the rest add up just fine. Then it will just say, ‘I don’t care about that outlier encoder.’
“If more than one encoder doesn’t align, it might conclude, ‘I don’t know where I am, stop operation!'”
If the ACS output doesn’t match that intended by the system design requirements, AuditSense has done its job and found a fault. And though Murphy’s law holds true – what goes wrong happens in a virtual environment with far less dire consequences.