

Large mass-engineered timber construction projects require placing hundreds of thousands of screw fixtures. A new collaboration sees a robot do the hard work.
At the Murdoch University campus in Perth, a new mass-engineered timber (MET) building is being erected. The project will be Western Australia’s largest MET building, but that is not what was attracting attention to the building site one day this past May.
The reason for the television news cameras, the careful safety precautions, the interested labourers debating whether they could work faster than the new hire, dated from a conversation Pratik Shrestha CPEng, the Aurecon structural engineer leading the project, had a few years earlier.
“We were throwing random ideas out and we said, ‘Wouldn’t it be cool if there were robots on site?’” Shrestha recalls.
It was a “blue-sky idea”, he admits, but one that Aurecon wanted to see if it could turn into a reality.
“One of the things that we do at Aurecon is we have quite good relationships with other universities,” Shrestha tells create. “So we said, well, let’s do a matchmaking exercise to bring in University of Technology Sydney [UTS] – who are world leaders in robotics – partner them with Murdoch University and ourselves, and let’s … see where this goes.”
The end result was that trial run of a custom-designed robot built to deliver screw fixings on the construction site.
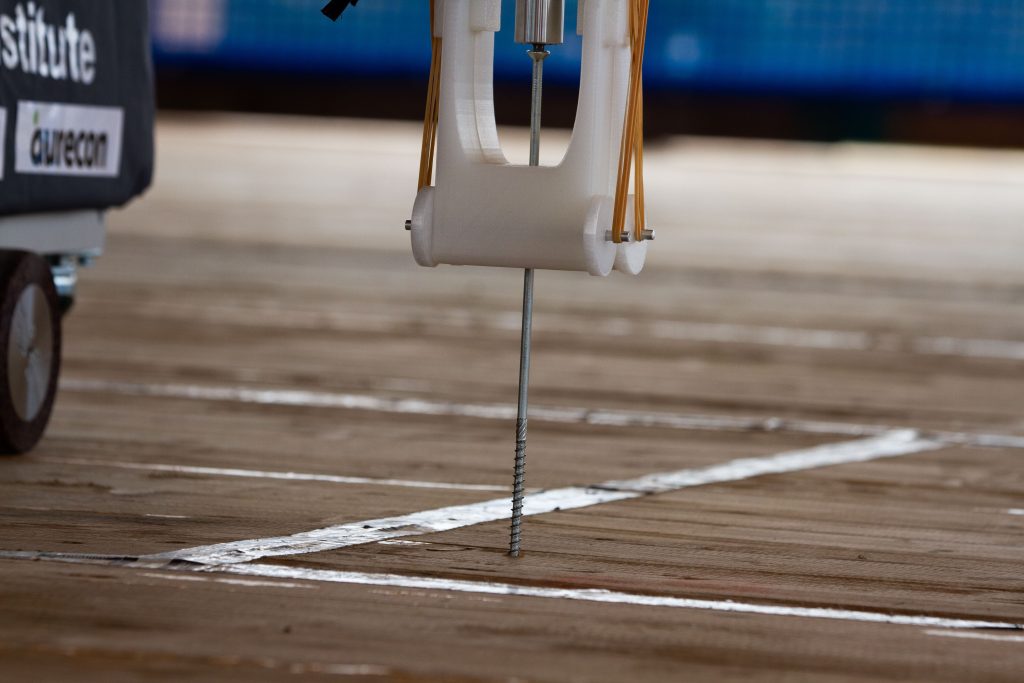
The entire building at Murdoch University would require 200,000 to 300,000 of the screws, but on this day, the robot was tasked with affixing 50 to 100 of them as a demonstration it could do the job.
“Everything ran very smoothly,” Shrestha says. “We had done sufficient testing in a lab environment that when we got to site, there were no glitches.”
The task is an ideal one for robots: the screws are cumbersome and numerous, and inserting them is repetitive.
“The screws that we’re installing aren’t just your Bunnings screws that you get for your house decking,” Shrestha clarifies. “These are 300 to 400 mm long screws; they’re as long as your fingertip to your elbow.” The fact that the Murdoch University project used MET made it ideal to develop a robot that could take on some of the work. Shrestha compares MET to a “giant Ikea set”.
“It’s highly prefabricated and it essentially comes in a flat-pack box; can we use robotics somewhere to be able to build it?” he says.
“So then we worked with UTS to develop that idea. The robotics specialist development itself, that was all UTS, but we were highly involved in conceptualising the robot in terms of what it had to do, how it had to perform.”
One challenge the team found was that robots do not instinctively correct for unexpected forces throwing them off-balance the way a human would.
“Robots don’t really have that sort of gyroscopic ability to balance themselves, so one of the biggest challenges was, if the screw was slightly on an angle, it would continue to go on an angle,” Shrestha says. “The other issue that we had was with the torque. With any timber construction, as you’re drilling in, you need to vary the torque … because timber has varying density. It might have knots in the timber. So a robot, if you just set it to a single torque, we found that the screws kept buckling out of position.”
The engineers also had to make sure the robot could navigate safely around the construction site, which involved using lidar and building information modelling (BIM), as well as precautions such as a manual override and an automatic stop function.

“We used our BIM model to feed into the robot to create a digital twin. So the robot, when it arrived on site, loaded up the BIM model and it knew where it was in space, and then it used the columns – the physical columns – to triangulate its location,” Shrestha says.
“The robot then automatically navigates to where it needs to go, and then it starts drilling in the screw fixings to less than 5 mm accuracy.”
Ensuring that navigation function worked involved thinking about the practicalities of working on an actual construction site, rather than a controlled laboratory environment. “A construction site is never static,” Shrestha says.
“There’s people, there’s mobile platforms, there’s high-vis that’s reflecting back on to the robot. So getting a robust enough navigation system was one of the biggest challenges early on, and with UTS, we did lots of virtual simulations using the digital twin to be able to say, okay, we can have full reliance on the navigation system.”


How long was the robot on site for and how many screws did it actually affix total?