

A team of Australians is set to compete in the upcoming DARPA subterranean challenge. The mission: to create robots that can map mine tunnels or plan underground rescues autonomously.
CSIRO’s Data61 Robotics and Autonomous Systems group has been selected as one of seven teams to participate in the US Defense Advanced Research Projects Agency (DARPA) Subterranean (SubT) Challenge.
The Australian team received funding to the tune of US$4.5 million, and will pit their wits against representatives from Carnegie Mellon University, Endeavor Robotics, the California Institute of Technology and the Universities of Colorado, Nevada and Pennsylvania. The victorious system will win a US$2 million (AU$2.83 million) prize.
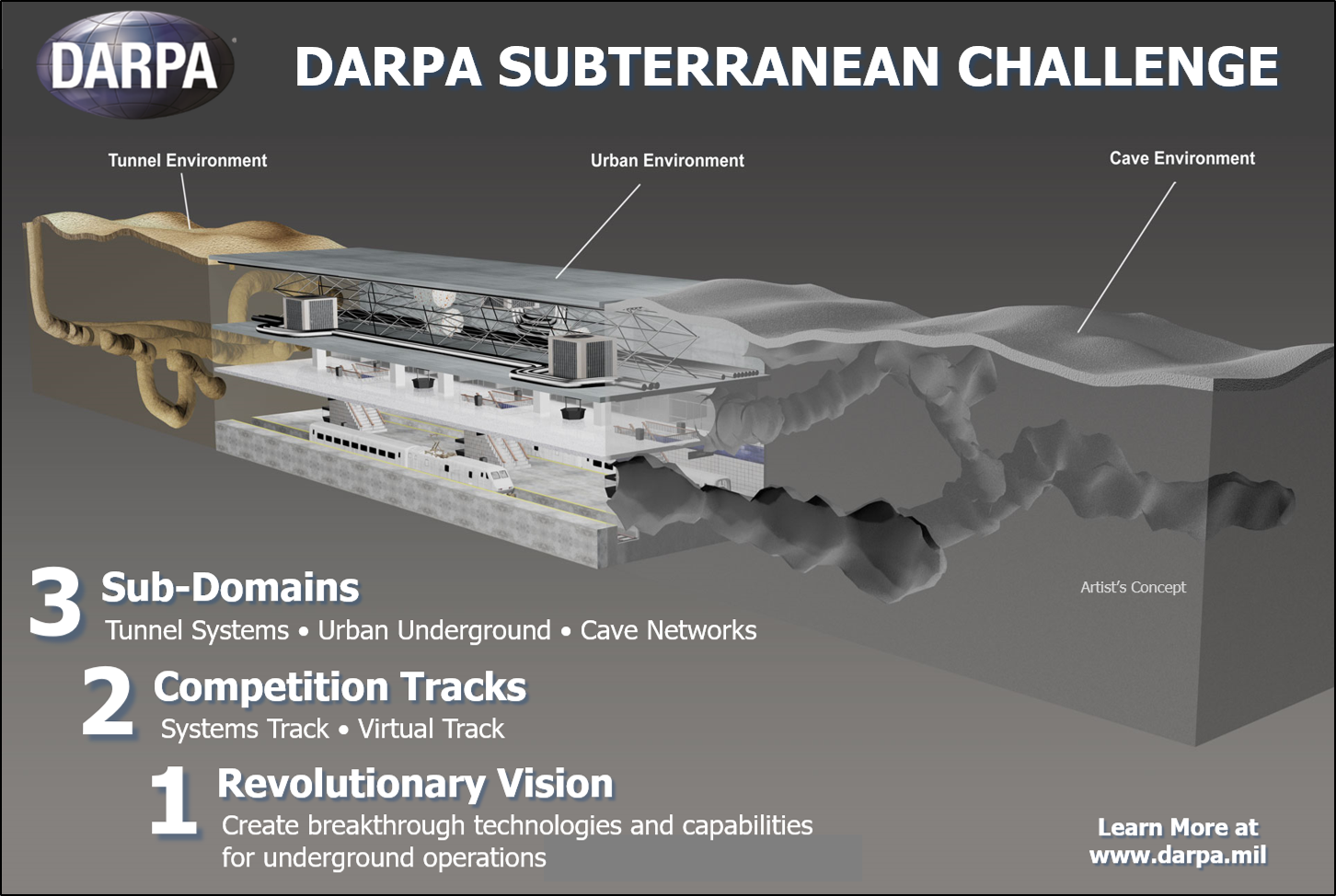
Challenge competitors will put their systems to the test on tracks corresponding to three field environments. The tunnel challenge is planned for 2019, with urban underground and natural cave courses to follow in 2020 and 2021.

According to CSIRO’s group leader Fred Pauling, participating in the challenge will drive the development of technologies with local relevance in Australia.
“[These include] autonomous mapping and inspection systems, and advanced communication systems for harsh indoor environments, such as underground mines,” Pauling explained.
He added that the robotic and network technology developed could be applied across industries such as transport, construction and agriculture.
Legs and wings
Pauling said the CSIRO team will rise to the challenge with both air- and ground-based technology: combining ultralight six-legged robots with drones using its Hovermap 3D mapping and autonomy tech.
“We’ll be creating a robot team that can rapidly explore and map challenging underground environments, providing unprecedented situational awareness in time-critical scenarios such as disaster response,” he added.
The walking and flying robots will be equipped with LiDAR scanners to create 3D maps of their underground surroundings. Importantly, Hovermap drones are able to operate in environments without access to GPS, which makes underground use possible.

CSIRO’s technology already has an impressive record of success in the field. One of their hexapod six-legged robots has recently been deployed to autonomously navigate the Amazon rainforest to remotely monitor biodiversity.
Hexapods can be programmed to imitate the movement of insects and larvae such as ants, caterpillars and cockroaches. They are equipped with joint-mounted sensors to monitor and negotiate uneven ground conditions, and stereo cameras to map and avoid obstacles.


The organisation’s Hovermap drone technology also has some runs on the board for underground autonomous flights. Last year, scientists collaborated with mining company Northern Star to test a drone equipped with a Hovermap system inside the Jundee Gold Mine in WA.
But there is still some work to be done before the drones are completely independent of human control. The system tested in WA was able to successfully negotiate a 54 metre high cavern with the aid of a map created during a previous piloted flight, but needed to be manually landed due to a hardware glitch.
According to the CSIRO website, Hovermap systems are self-contained units that can be mounted to industrial drones. The LiDAR rotates to produce a spherical view that allows the drone to avoid collisions and map its environment. The tech recently won a primary industries award at the Australian Information Industry Association iAwards in Queensland.