

A UTS team has developed an award-winning robotics system that can inspect pipes without having humans crawl into sewers.
The concept of the three Ds is well known in robotics: robots are perfectly suited for jobs that are dirty, dangerous or dull.
Inspecting a sewer system is a task that falls into all three categories. That is why Professor Sarath Kodagoda, an engineer with the University of Technology Sydney, and his team developed a robotic system capable of the necessary but unpleasant job of exploring Sydney’s network of concrete sewer pipes and locating sections that need maintenance or repair.
“The things that we flush in the water tend to have sulphate, which is turning into hydrogen sulphide,” Kodagoda explained.
“Then the bacteria living on that surface attacks and converts that into sulfuric acid, which is attacking the concrete, making it softer.”
Sydney Water spends an estimated $40 million annually rehabilitating its network of more than 100-year-old pipes.
“Normally, Sydney Water — and other water utilities — what they currently do is frequently go and check how their sewers are doing,” Kodagoda said.
“If they are big enough for people to go in, then they use either a chisel or something sharp to take out the soft part of the concrete manually before taking measurements.”
For pipes too small for a person to enter, the utility relies on closed-circuit TV cameras — an imprecise and inelegant solution.
Kodagoda’s answer is a comprehensive tool capable of inspecting both kinds of pipes. Named CRAFT — or Corrosion and Rebar Assessment Floater — the tool does use robotics, but it also features an array of other sensors.
“We are using ground-penetrating radar at a certain frequency to penetrate the structure,” Kodagoda said.
“We get the information back and then we analyse it to see if there are any differences in the signal.”
The system also adds extra features to the closed-circuit TV cameras to make them more effective.
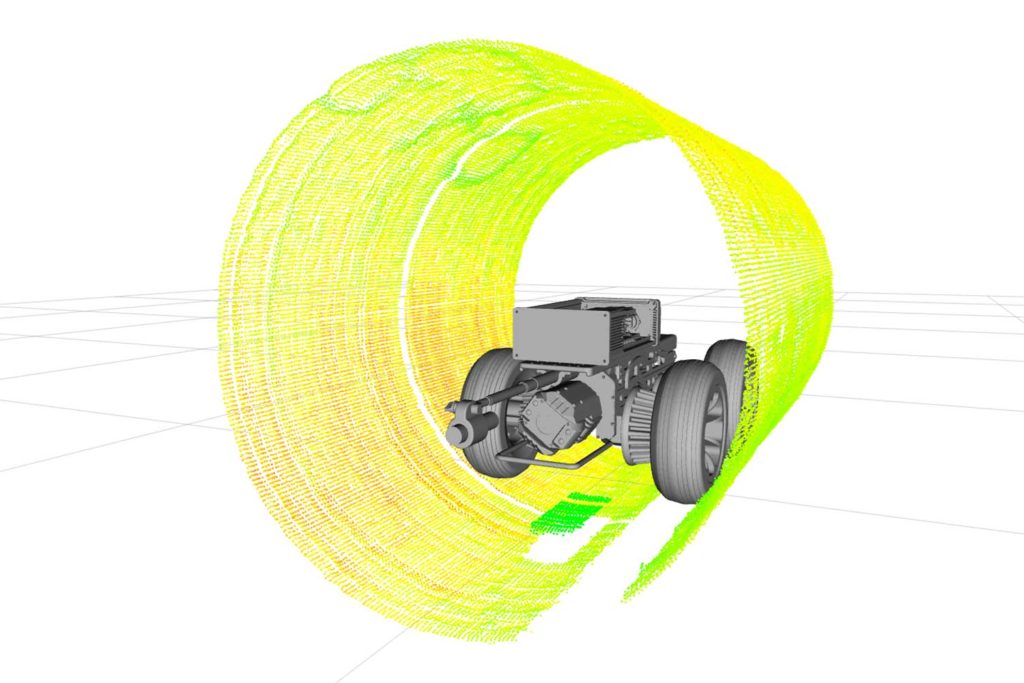
“It has visual information all laid on three-dimensional structural information, which we calculate based on what we call laser profiling,” Kodagoda said.
“We provide that as the first look and then the operators can decide, oh this place, it’s a bit suspicious, so let’s take a proper look at it.”
Then there’s the robot itself.
“We built a system which can float, and, at the same time, it can expand and retreat so that it can take measurements as we need it,” Kodagoda said.

That pattern of movement exists to deal with the unpleasant nature of the robot’s environment.
“There will be water flows there — not nice water,” Kodagoda explained. “One of the things that the experienced sewer-traversers mentioned was human hair. If, for example, the robotic device has wheels, which get clogged, it won’t last long.”
The ingenuity of the system has been recognised by the Australian Water Awards, at which the team was presented with a National Research Innovation Award.
Having reached the final stage of testing, the tool will be introduced into Sydney’s sewers this month. After that, Kodagoda said he has received interest from officials in the US and the UK.
“We are in direct contact with them to see whether this technology can be tested in their systems,” he said.
Sewer specs
- Sewer pipe size: 900 to 1500 mm in 100 m length sections
- Manhole size: 610 mm
- Water depth: 1/3 of the diameter (300 – 500 mm)
- Silt level: Half of water depth
- Battery operation time: 3 hours
- Sensors: Ground-penetrating radar, cover meter, 3D mapping, CCTV
- Length: 1.2 m
- Weight: 50 kg

