

Traditionally, maintaining the Sydney Harbour Bridge required workers to enter confined and potentially dangerous spaces. This company’s robots are far better suited to the task.
As the iconic Sydney Harbour Bridge nears its first century in operation, it is turning to 21st century robotics for help with its maintenance.
The bridge is held together by about six million rivets, historically produced in a hazardous process that involved “rivet cookers” throwing red-hot rivets to workers who caught them in buckets and then hammered them into place.
Now, an innovative Australian company is help the bridge take its steps into the digital age by developing a bespoke solution to help the keep the bridge in top shape for the future.
Maintaining integrity
Maintaining the bridge is no easy task. Running at just more than 1 km — the bridge falls short of being the world’s longest single-arch bridge by a mere 700 mm, its annual maintenance cost is around $5 million.

This includes painting the bridge, which requires around 80,000 litres of paint a year.
But it is replacing the rivets — and removing the need for people to work in confined spaces within the bridge’s chords — that is the core focus of the Australian-owned and operated NXTGEN Industries.
The company was brought in to deliver a safe and cost-effective maintenance solution.
Historically, these rivets were put in by hand and replacing them nowadays would require workers to enter narrow, confined spaces. However, by using robots, the project not only increases safety but can also speed up the entire process.
NXTGEN Industries, which is headed by former Arup engineer Daniel Messina, has used local skills and capabilities to bring the Harbour Bridge — and its maintenance — into the next era, developing robots designed to navigate the inside of the bridge’s chords to replace these rivets.
“We’re ensuring the integrity of the bridge is maintained,” Messina said.
“It’s one of Australia’s most iconic assets and an essential piece of infrastructure, so maintaining it is important to us.”
The unique nature of the bridge required a custom-made, engineering solution approach.
“Firstly, we needed to understand the requirements and the drivers for the project,” he said.
Since a task like this had not been attempted before, the team had to construct a scale replica of the bridge to investigate the project’s constraints and determine how the robots could work.
“We then detailed this design and made a functional prototype,” Messina said.
“Testing allowed us to tune and adjust the system to achieve a practical and reliable outcome. We then made another two robots for site deployment. The prototype robot will serve as a standby unit for when the other robots need maintenance.”
The robots are expected to roll out on to the bridge in 2022.

Introducing the BMRs
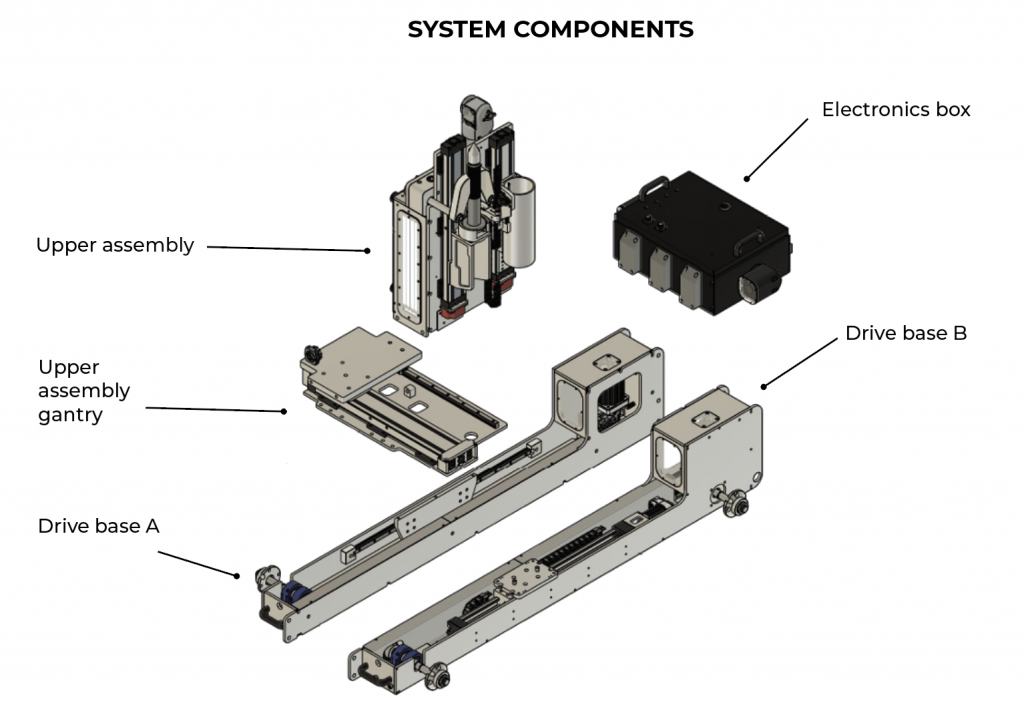
The robots, dubbed Harbour Bridge Maintenance Robots, or BMRs, are built from five modular units, comprising two lower-drive assemblies; an X-axis gantry assembly; an upper assembly tool head; and an electrical and communications cabinet, which come together to form a robot approximately 1.5 m long, half a metre wide, and 800 mm tall.
They have pneumatic wheels for improved traction and to provide some suspension as they drive over the rivet heads.
“They were designed in this way, as they need to fit into the access hatch on the bridge. The access hatch is extremely small: only 300 mm wide and 540 mm long,” Messina said.
Construction teams will work in partnership with the robots, walking along the exterior of the arch to identify rivet groups that need to be replaced.
These workers will direct the robots through access hatches to where they are needed, using lasers to highlight the rivet to be replaced.
Once the robot is in place, construction crews remove the rivet from the top, with the waste being caught by the robot, which then inserts a new bolt that can be fastened from the top using a special fastening tool.
While the robots can speed up the maintenance process, Messina said the real value is in improving safety.
“Our robots are removing the need for people to work in a confined space over the length of the project,” he explained.
“An additional safety concern was the extra personnel that would have been needed to coordinate the confined space work. The construction area on the top of the bridge is not very wide, so adding more people to the construction area could increase site risks.”
This de-risking provides a significant value.
“This effectively would influence savings in insurance, confined space training, ongoing operational processes, ongoing environmental monitoring and additional workers throughout the project.”

What’s next?
Winning this project was a coup for the newly minted NXTGEN, which was founded by Messina in 2019.
Messina said the company is focused on a number of projects involving autonomous solutions for asset inspection and monitoring, adding that it is in the process of ensuring its engineers are all members of Engineers Australia.
“We are developing autonomous mobile robots for land, air and marine applications; These systems make use of autonomous navigation, obstacle avoidance and advanced perception systems,” he said.
“Industries such as infrastructure, mining, industrial automation and agriculture have large assets that are often spread over large distances — areas — and these assets often require frequent inspections and maintenance.
“NXTGEN Industries are integrating advanced sensors on autonomous mobile systems to quantify and present data to humans to make informed decisions on how they wish to carry out maintenance or other business operations.”
Messina said the future is bright for robotics and automation, and the aim of this technology is not to replace people but enhance our capabilities and perception using advanced systems.
“Whilst robotics are innovative, I feel it can hold a negative connotation amongst the public,” Messina said.
“We as a society should focus on how this technology can help us grow and improve the way we live and do business. It helps us work smarter, not harder.”
Ready for the real world
While the Sydney Harbour project has been a learning experience, Messina said getting the software it uses ready for real-world hazards was one of the larger hurdles.
“There were definitely challenges along the way, sometimes features didn’t work as well as we hoped,” he explained.
“An example of this was when we investigated traction control, however, this complicated the design and didn’t add much value. We focused a lot on refining the physical design to reduce complexity in the control systems.
“The biggest challenge was taking the control software from an ‘operational state’ to a ‘robust state’; the difference in the two states was vast.”
He explains that the challenge with developing new systems is that the end result is not wholly defined, so it was important to approach its development in a more strategic manner to create a solution that works for all parties involved.

